

The powerful controller enables comparatively faster product and gripper changes than conventional systems. Changeover times are thus minimized. Cycle times as fast as 6 seconds are possible, depending on the products.
High system availability is due to the collision-free movement of the robot and the gripped products. The user-friendly interface allows the end user to create new parts without extensive programming knowledge.
The unit and the vision system (camera, resolution, and lens) are specifically tailored to each customer's needs. The integrated product management is designed with a large volume in mind. For maximum flexibility.
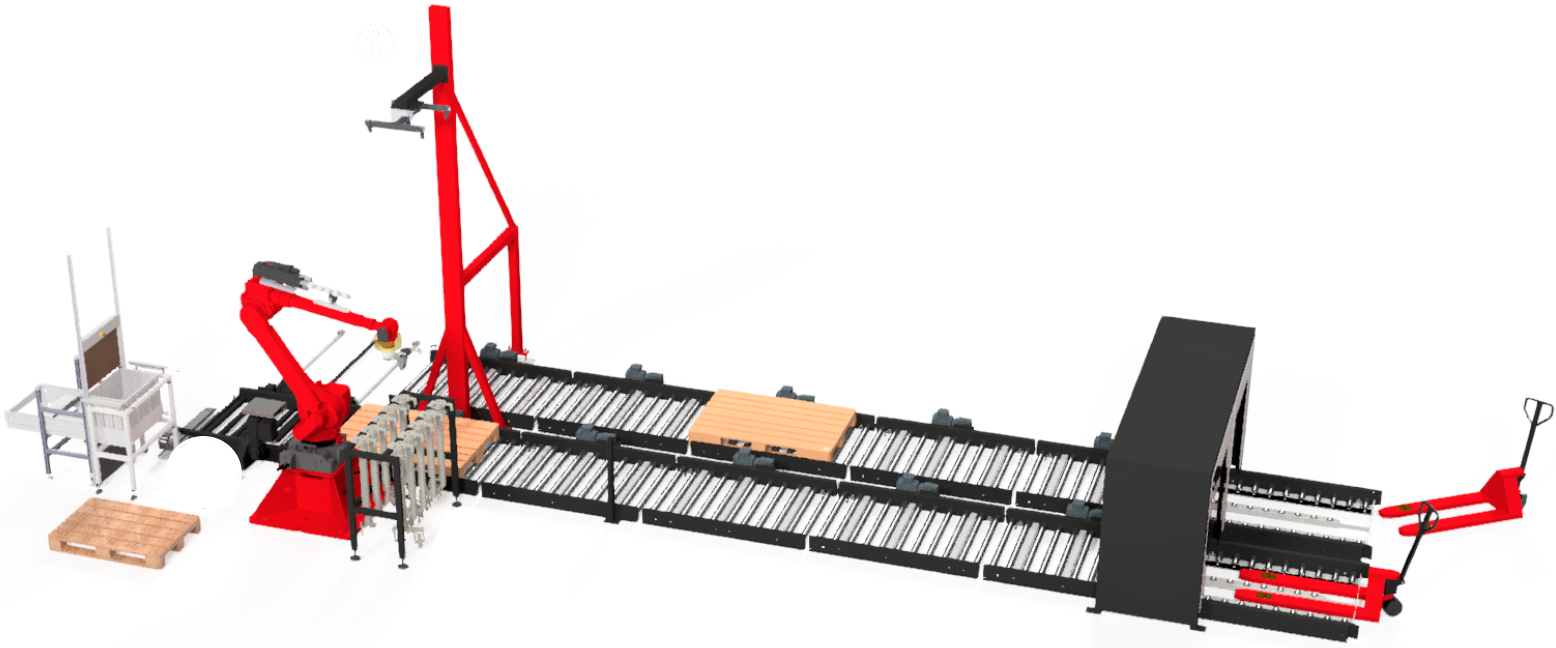
The perfect bin-picking cell for speedy separation
Address the shortage of skilled workers
with an automation solution from Rotte: CAMGripX-1200

No problem! Our CAMGripX-1200
ensures efficient separation.

Here are some possible examples of use:
- Sorting of small parts and components in the electronics industry
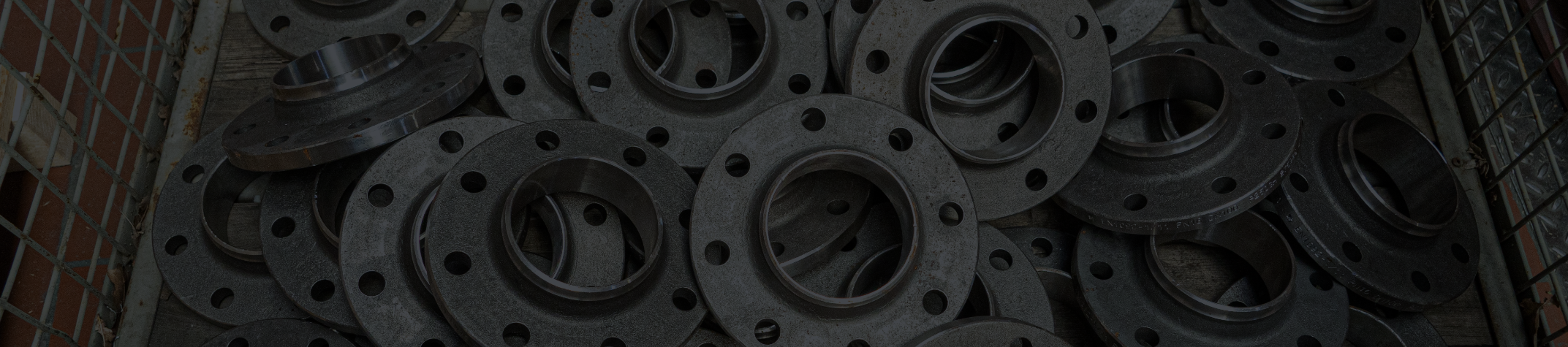
- Separation of screws, nuts and bolts in the automotive industry
- Picking orders in e-commerce or retail companies
- Handling of critical products in the pharmaceutical or food industry

Direct support. The unit and the vision system are developed and manufactured in Germany. This means short distances in case of questions or support.
Enjoy the numerous benefits and gain a competitive edge:
- Picking of a large variety of product types
- Fast product changeover
- Short changeover times due to automatic gripper exchange
- Cycle times from 6 seconds, depending on the product
- Suitable for extremely shiny parts such as newly turned and milled parts, polished surfaces of any kind, chrome-plated objects, and much more.
- High resolution (approx. 0.8mm) for precise gripping.
- Comparatively large workspace 1,400x1,100x1,200 (LxWxH).
- System is capable of modular expansion for future products.
- Teaching-in of new products without requiring in-depth programming knowledge.
- The camera is sealed against dust and dirt particles.
- Integrated path planning, collision monitoring and user-friendly user interface.

Experience CAMGripX-1200
in action – Visit us on site.
The benefits of the CAMGripX-1200 give you a competitive edge.
Benefit from our experts’ expertise, and convince yourself of the many possibilities offered by our technology.
Rotte-Service:
By rebuilding or expanding, you have the opportunity to quickly and cost-effectively adapt your machines to the latest requirements and trends - and of course always maintain safety and quality in your production operation.
Every bin picking application is unique
The feasibility depends on the provision, presentation form, product and further processing.









Strengthen your competitive position, and save time and costs
| CAMGripX-1200 | With its high precision and fast changeover times, this system is the perfect choice for companies that want to make their production more efficient and increase their flexibility. |
