

Der leistungsstarke Controller ermöglicht einen vergleichsweisen schnelleren Produkt- und Greiferwechsel als bei herkömmlichen Systemen. Umrüstzeiten werden somit reduziert. Abhängig von den Produkten sind Takzeiten ab 6 Sekunden möglich.
Eine hohe Anlagenverfügbarkeit ist durch die kollisionsfreie Bewegung des Roboters und der gegriffenen Produkte gewährleistet. Die bedienerfreundliche Oberfläche ermöglicht es dem Endanwender neue Teile anzulegen und das ohne umfangreiche Programmierkentnisse.
Anlage und Vision System (Kamera, Auflösung, Objektiv) werden konkret auf die Kundenbedürfnisse abgestimmt. Die integrierte Produktverwaltung ist für eine große Anzahl ausgelegt. Für maximale Flexibilität.
Die Bin Picking Zelle für die schnelle Vereinzelung
Begegnen Sie dem Fachkräftemangel mit einer
Automatisierungslösung aus dem Hause Rotte: CAMGripX-1200
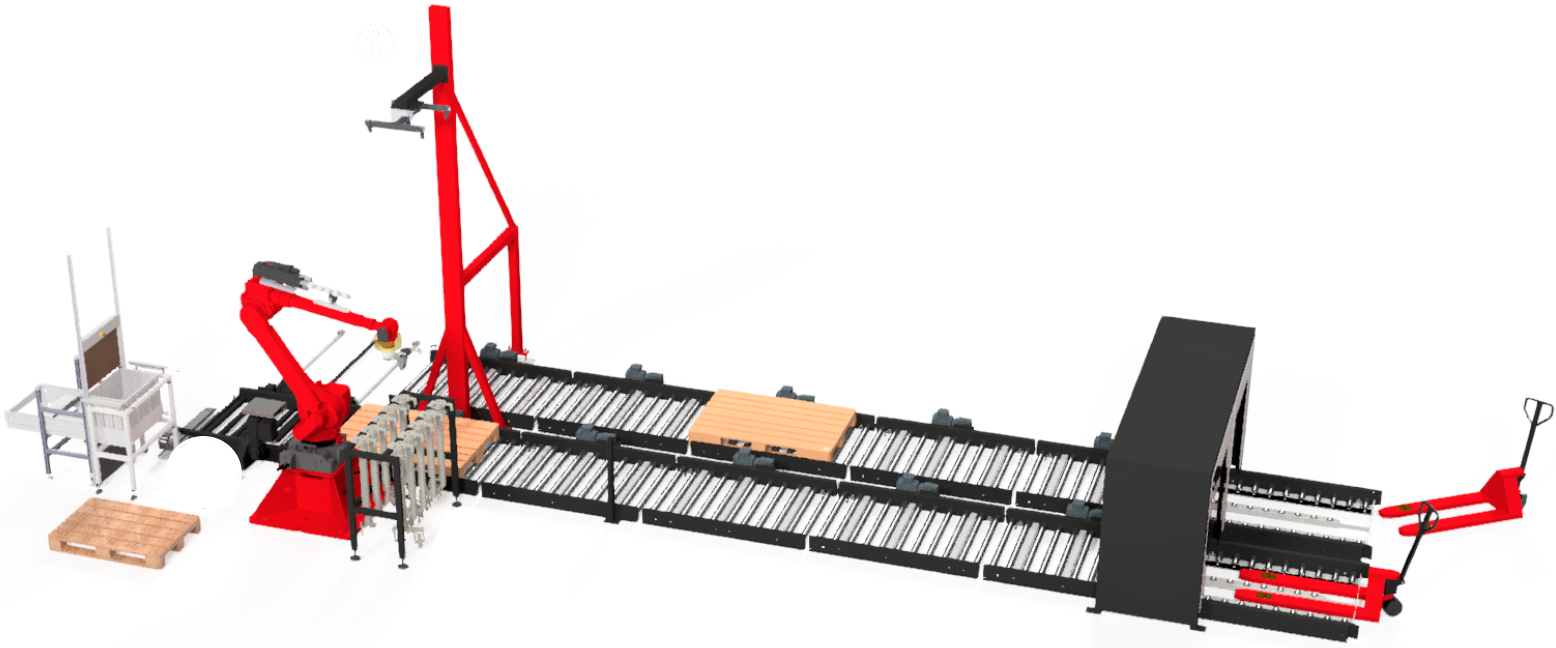

Kein Problem! Unser CAMGripX-1200
sorgt für eine effiziente Vereinzelung

Einige mögliche Anwendungsbeispiele:
- Sortierung von Kleinteilen und Komponenten in der Elektronikbranche
- Vereinzelung von Schrauben, Muttern und Bolzen in der Automobilindustrie
- Kommissionierung von Bestellungen in E-Commerce- oder Handelsunternehmen
- Handhabung von empfindlichen Produkten in der Pharma- oder Lebensmittelindustrie

Direkter Support. Die Anlage und das Vision System werden in Deutschland entwickelt und gefertigt. Kurze Wege also bei konkreten Fragen- oder Hilfestellungen.
Nutzen Sie die zahlreichen Benefits und schaffen sich einen Wettbewerbsvorteil:
- Picken einer großen Produktartenvielfalt
- Schneller Produktwechsel
- Geringe Umrüstzeiten durch automatischen Greiferwechsel
- Produktabhängige Taktzeiten ab 6 Sekunden
- Hohe Auflösung (ca. 0,8mm) für präzise Griffe
- Vergleichweise großer Arbeitsraum 1.400x1.100x1.200 (LxBxH)
- System ist modular erweiterungsfähig für zukünftige Produkte
- Einlernen neuer Produkte ohne umfangreiche Programmierkenntnisse möglich
- Abdichtung der Kamera gegenüber Staub und Schmutzpartikel
- Integrierte Bahnplanung, Kollisionsüberwachung und benutzerfreundliche Bedienoberfläche
- Geeignet für extrem glänzende Teile wie frische Dreh- und Frästeile, polierte Oberflächen aller Art, verchromte Objekte und vieles mehr

Erleben Sie CAMGripX-1200
in Aktion – Besuchen Sie uns vor Ort
Die Benefits der CAMGripX-1200 sind Ihr Wettbewerbsvorteil.
Lassen Sie sich von den vielfältigen Möglichkeiten unserer Technologie überzeugen und von unseren Experten beraten.
Rotte-Service:
Durch Umbauten oder Erweiterungen haben Sie die Möglichkeit, Ihre Maschinen schnell und kostengünstig den neuesten Anforderungen und Trends anzupassen – und dadurch natürlich immer Sicherheit und Qualität in Ihrem Produktionsbetrieb zu wahren.
Jede Bin Picking-Anwendung ist individuell
Die Machbarkeit ist abhängig von der Bereitstellung, Darbietungsform, dem Produkt und der Weiterverarbeitung.









Stärken Sie Ihre Wettbewerbspositionund sparen Sie Zeit und Kosten
| CAMGripX-1200 | Dank ihrer hohen Präzision und ihrer schnellen Umrüstzeiten ist diese Anlage die ideale Wahl für Unternehmen, die ihre Produktion effizienter gestalten und ihre Flexibilität erhöhen möchten. |
