- Variables Zwischenpuffern der Bauteile
- Kommissionierte Stapelbildung nach Packbildvorgabe
- Universalgreifer zum Handling aller Bauteilgrößen
- Automatische Pappenzuführung als Zwischenlage für empfindliche Oberflächen
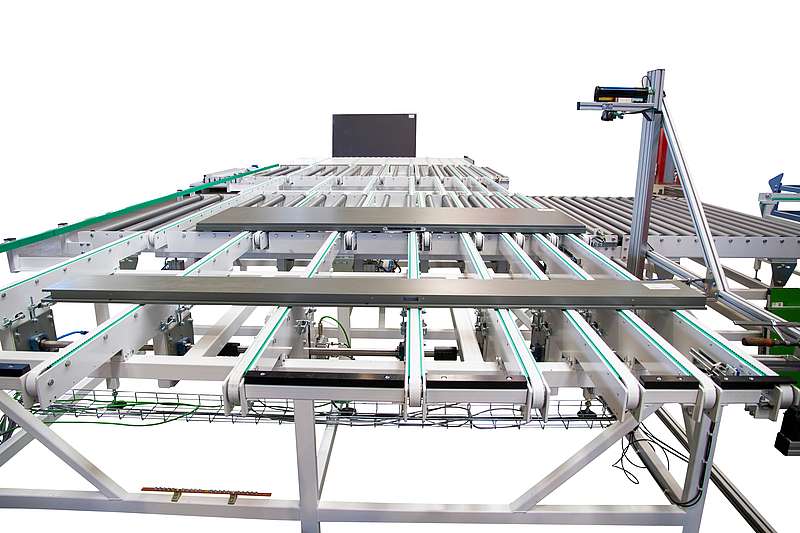
- Transport von Bauteilen in verschiedenen Dimensionen
- Automatische Bauteilerkennung durch Bar- oder QR-Code
- Zusätzliche manuelle Ein- bzw. Ausschleusmöglichkeit
Beschreibung:
Nach dem vorgelagertem Bearbeitungsschritt, wie z.B. das Heißpressen von Verbund-Werkstoffplatten oder anderen flächigen Bauteilen, werden diese durch die Transportstrecke übernommen.
Je nach Lagebild können hier bis zu vier Werkstücke zugeführt werden. Diese werden anschließend automatisch vereinzelt und einzeln dem Roboter zugeführt. Die Lage wird vermessen, sodass der Roboter die Platten positionsgenau mit seinem Universalgreifer entnehmen und anschließend dem zugewiesenen Regalfach zuführen kann.
Nach der Abkühlzeit entnimmt der Roboter die Platten und stapelt diese gemäß eines vorgegebenen, individuell berechnetem Packbildes auf einen Kommissionierwagen ab. Hierbei werden durch den Roboter bis zu vier Pappstreifen zwischen jeder Lage platziert.

